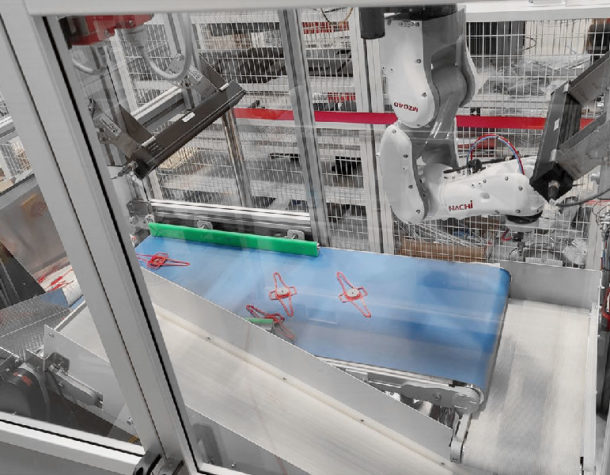
The project covers the supply and installation of a robot system to shear and discard 2 screw heads for both the AS300 and AS302 meter housings and additionally assemble two plastic bung’s to the AS302 smart meter housing on a new smart cell test and print machine.
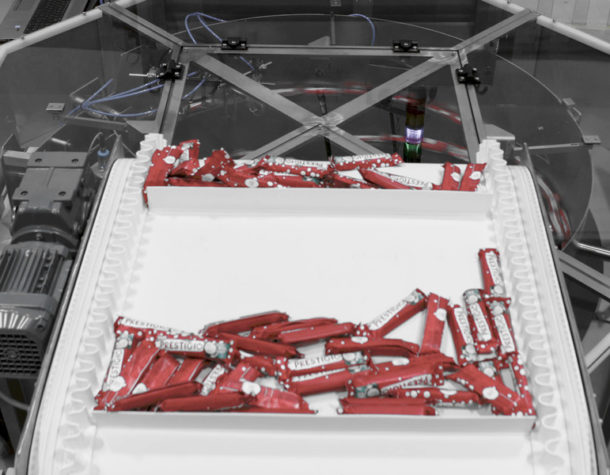
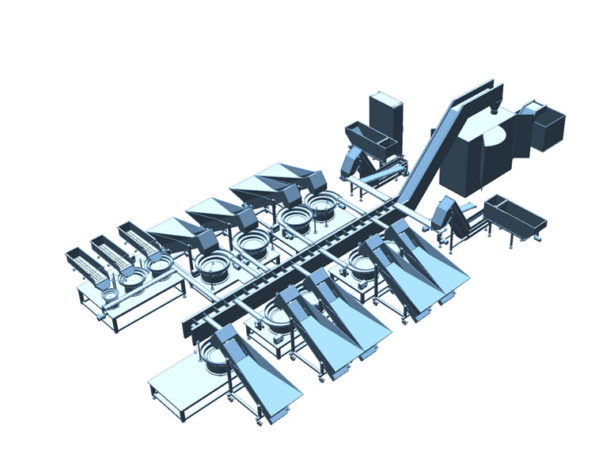
The sheared screws are removed and deposited into a waste container via a chute using a Nachi 6 axis robot. The bungs are fed using individual bowl feeder’s to dead nests and are assembled using the same robot using vacuum and are fully assembled using plunger mechanisms.
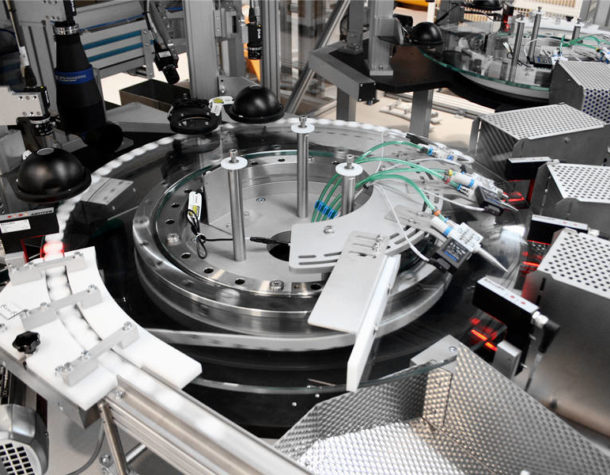
The meter housings are indexed from the existing laser printing station to the shear and bung assembly station using the main machine pallet indexing system.
Sequence of Operation
APL Skills
Bowl feeding, Robot Assembly, Machine building and integration, Machine and process control, Pick & place, PLC control, Project management